Quantum GIS plugin for visibility analysis
NB. This page is no longer maintained, please go to (https://landscapearchaeology.org/qgis-visibility-analysis)[https://landscapearchaeology.org/qgis-visibility-analysis] for the up-to-date documentation.
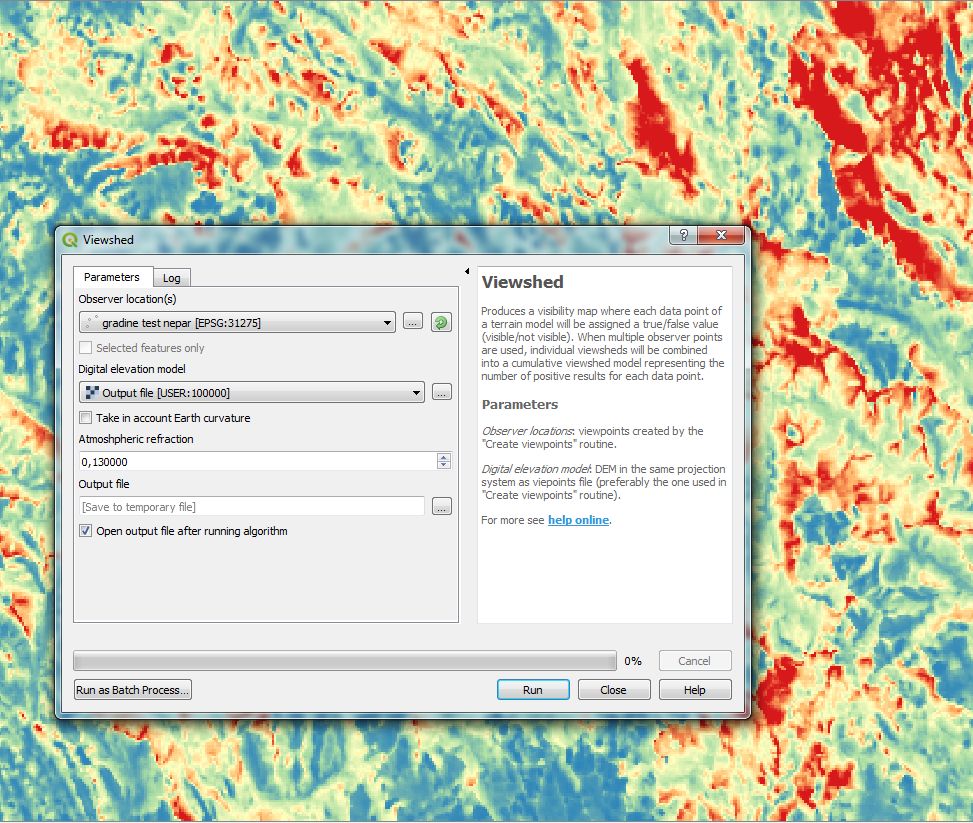
Introduction
Viewshed analysis plugin for QGIS calculates visible surface from a given observer point over a digital elevation model. The plugin is intended for more complex modelling, such as the depth below the visible horizon or generation of intervisibilty networks between groups of points. It is particularly performant for multiple viewshed calculations form a set of fixed points. Licence: GNU GPL v.3
If you encounter problems, please read on geographic projections before submitting an issue.
Current stable version: 1.5 (February 2021)
- Supported QGIS version: 3.x
- Help & documentation
Deprecated version: 0.5
- Supported QGIS version: 2.x
- Help & documentation
Archived at: ![]()
Publication
“Advanced viewshed analysis: a Quantum GIS plug-in for the analysis of visual landscapes.” by Zoran Čučković in The Journal of Open Source Software 4(1). doi: 10.21105/joss.00032
More information
You can signal an issue at GitHub
For further information on algorithms used, case studies etc. take a look at LandscapeArchaeology.org and zoran-cuckovic.from.hr .
Data used for testing and tutorials can be found here.
Qgis visibility analysis maintained by zoran-cuckovic
Homepage: zoran-cuckovic.from.hr
Archive
-
May 1, 2020: Visibility index / total viewshed
-
March 30, 2020: Direction and angle filters for viewsheds
-
March 15, 2020: Basic tutorial for QGIS 3
-
December 6, 2019: Analysing visual impact of high buildings
-
April 7, 2019: Intervisibility analysis
-
October 23, 2018: Depth below horizon analysis
-
July 15, 2018: Testing perfomance of 0.6 version
-
July 3, 2018: 0.6 version - compatible with QGIS 3
-
December 22, 2016 : Visibility analysis, release 0.5.4: modelling the horizon
-
July 30, 2016: QGIS visibility analysis algorithm
Community guidelines and feedback
This project is released with a Contributor Code of Conduct. By participating in this project you agree to abide by its terms. Feedback, bug reports (and fixes!), and feature requests are welcome and can be submitted at GitHub or reported directly through author’s contact (above).
Ackowledgments
Thanks to Alexander Bruy and Gilles Vuidel.